Pololu Blog » Posts tagged “raspberry pi” »
Posts tagged “raspberry pi” (Page 4)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New product: Raspberry Pi Model B+
 |
The Raspberry Pi single-board computer has been around for a little over two years in its original Model A and Model B versions, and in that time, it’s become a very popular platform for electronics experimentation. With many of the same capabilities as a regular desktop or laptop PC, but at a small fraction of the size and cost, the Raspberry Pi offers features like network connectivity and significant processing power for robots and other electronics projects.
|
|
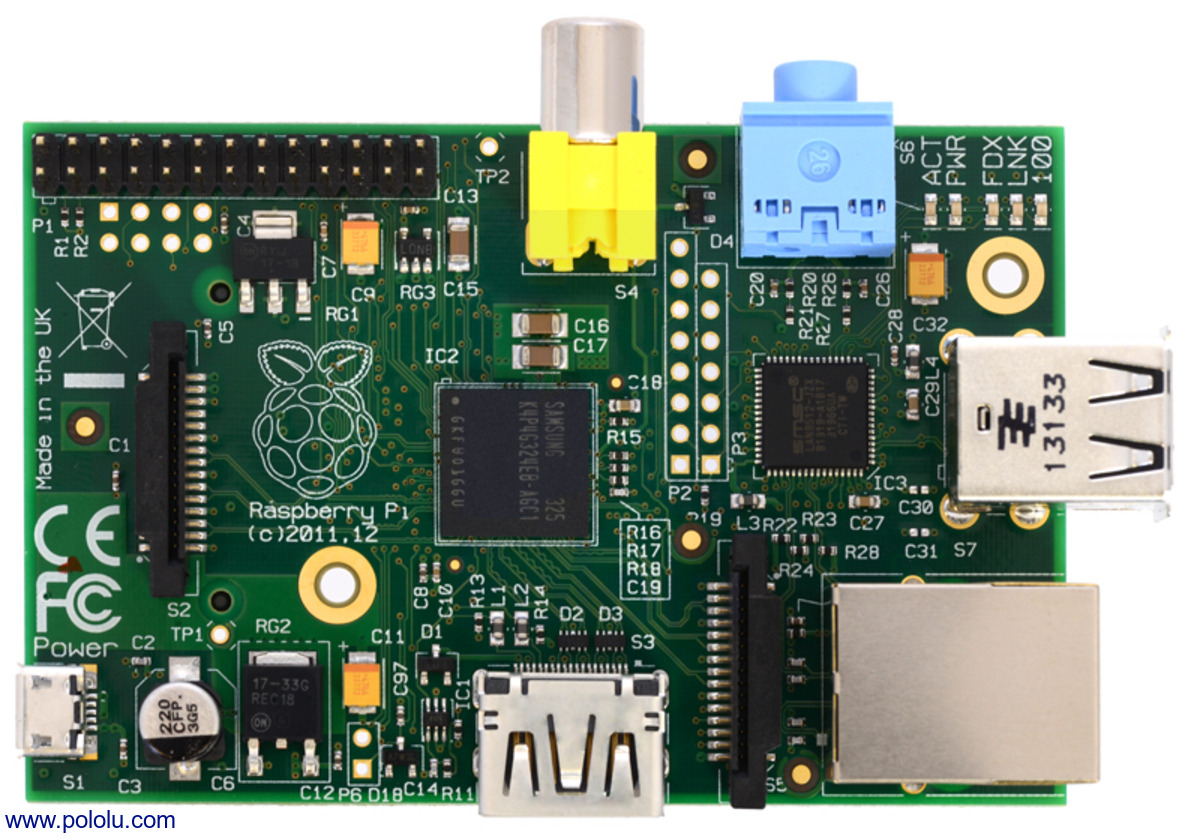
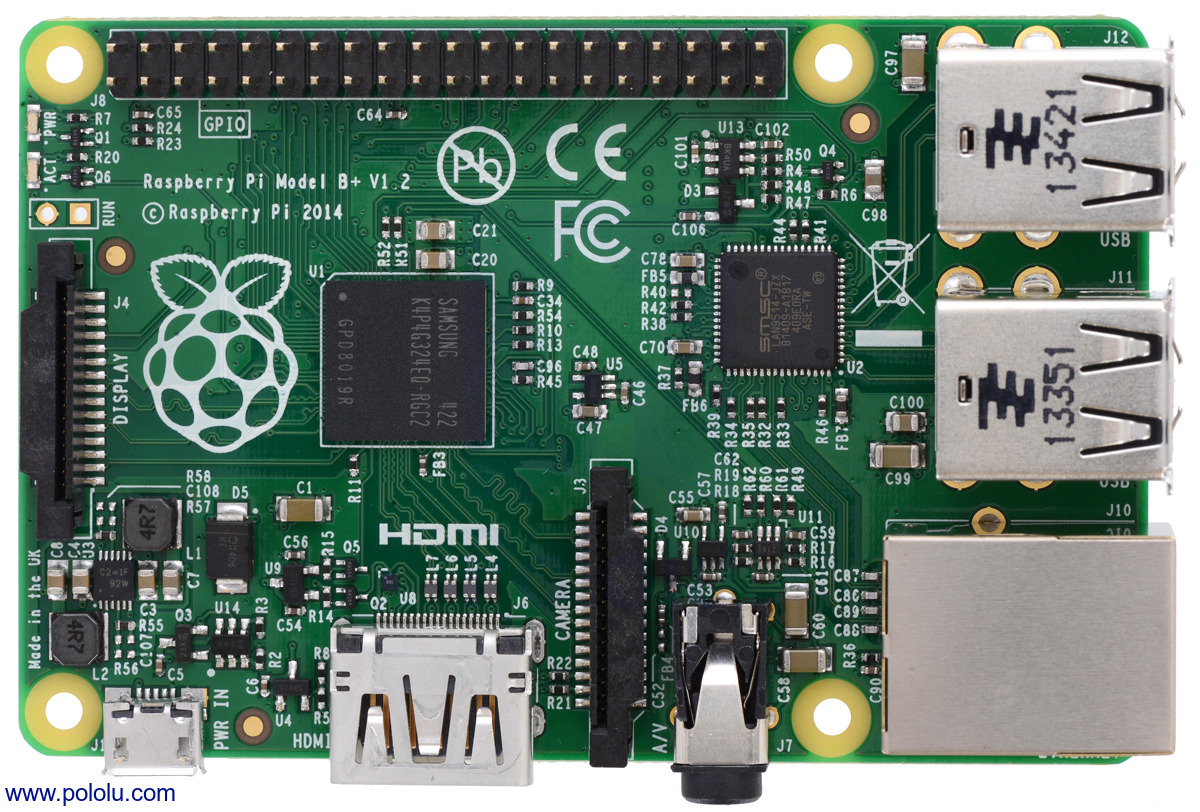
We’re now selling the new Raspberry Pi Model B+, which improves on the Model B in a number of ways:
- More GPIO pins are available on a 40-pin header; the Model B has a 26-pin GPIO header.
- The number of USB host ports has been doubled to four.
- Switching regulators lower the power consumption of the Model B+ by 0.5 W to 1 W compared to the Model B (which uses linear regulators), while audio is improved by a dedicated low-noise power supply.
- A much smaller microSD card socket replaces the previous full-size SD card socket.
- Audio and composite video output are combined on the 3.5 mm jack, and many of the connectors extend much less past the edge of the board (as does the inserted microSD card).
- Four mounting holes provide more flexibility in mounting the Model B+.
We’ve seen our customers build lots of cool projects with the Raspberry Pi, including a wirelessly-controlled Zumo robot with a video camera and a robotic ping-pong ball collector. We look forward to seeing what you’ll do with the Model B+!
Related products


Version 2.0.0 of minimu9-ahrs released
This week I released version 2.0.0 of minimu9-ahrs, an open-source demo program that runs on the Raspberry Pi, reads data from a MinIMU-9 via I²C, and uses the readings to calculate the orientation of the IMU. The new version adds support for the MinIMU-9 v3. The program now supports all past and present versions of the MinIMU-9.
The original version of minimu9-ahrs was released back in 2012, along with ahrs-visualizer, a program for displaying the orientation in 3D. For more background, you can see my blog post about minimu9-ahrs from 2012 or read the Raspberry Pi blog post about it from June 2014. The video below shows minimu9-ahrs and ahrs-visualizer working together:
Version 2.0.0 of minimu9-ahrs also includes some other changes:
In this new version, the raw accelerometer readings that you can get using the --mode raw option have basically been multiplied by 16 from what they were before. We made this same change to our LSM303 Arduino library when we added support for the LSM303D. The reason for this change is that before the MinIMU-9 v3, all the MinIMU-9 accelerometers were 12-bit, with the lower 4 bits of the output registers being unused, so we always shifted the readings to the right by 4 bits to get rid of the unused bits. The LSM303D in the MinIMU-9 v3 has a 16-bit output, so shifting its readings to the right by 4 bits would be inappropriate. However, it is nice for the raw accelerometer readings to have the same scale regardless of which accelerometer you happen to be using, so we chose to stop shifting the output of any of the accelerometers. All the accelerometers are configured to have a full-scale range of ±8 g by minimu9-ahrs, so a reading of 4096 will always correspond to about 1 g. This change should not affect most users, but it is not backwards-compatible, so, following semantic versioning, I incremented the major version number from 1 to 2.
The Debian package that I made for minimu9-ahrs version 2.0.0 uses the armhf architecture instead of armel (which was used for previous versions), so you can easily install it on a Raspberry Pi running Raspbian. I also made a new version of ahrs-visualizer that has an armhf package. If you are not using a Debian-based distribution like Raspbian or you are not using the armhf architecture, you can still compile the programs from source.
With this new version of minimu9-ahrs and our recent big price reduction of Pololu IMUs (which made the MinIMU-9 less expensive than a Raspberry Pi), now is a great time to start experimenting with these state-of-the-art MEMS sensors.
Related past posts
- Big price reduction of Pololu MEMS sensor carriers and IMUs
- New product: AltIMU-10 v4 gyro, accelerometer, compass, and altimeter
Related products




New product: Adafruit Pi Case
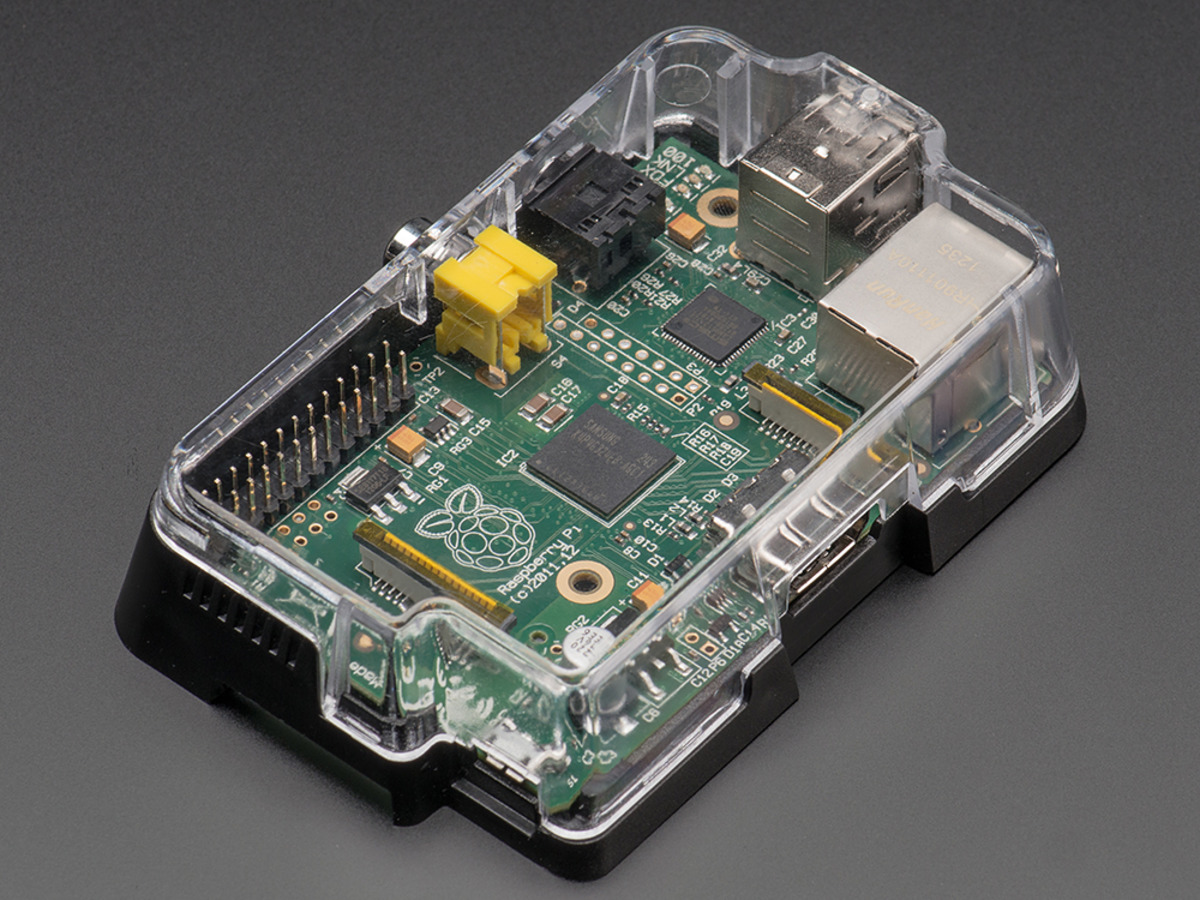 |
We are expanding our selection of products from Adafruit, and the latest addition is the Adafruit Pi Case, a stylish protective enclosure for the Raspberry Pi. And to celebrate, we are dropping the price of our Raspberry Pis!
Related products

New product: 5V wall power adapter with USB port
 |
Looking for a power supply for your Raspberry Pis, Arduinos, Wixels, or Maestro servo controllers? Look no further!
This UL-certified AC-to-DC converter gives you an easy way to deliver up to 1 A to your USB-powered device from a US-style AC electrical socket. It has been specifically designed to supply 5.25 V instead of 5 V to help ensure that the device it is powering receives close to 5 V even when the current draw is high. This converter is safe for use with USB-compliant devices.
This adapter does not include a USB cable, but it features a USB “A” port that you can plug a standard USB cable into, which makes it great for transitioning your project from USB to wall power.
For more information, see the 5V wall power adapter product page.
Related products

Raspberry Zumo Robot
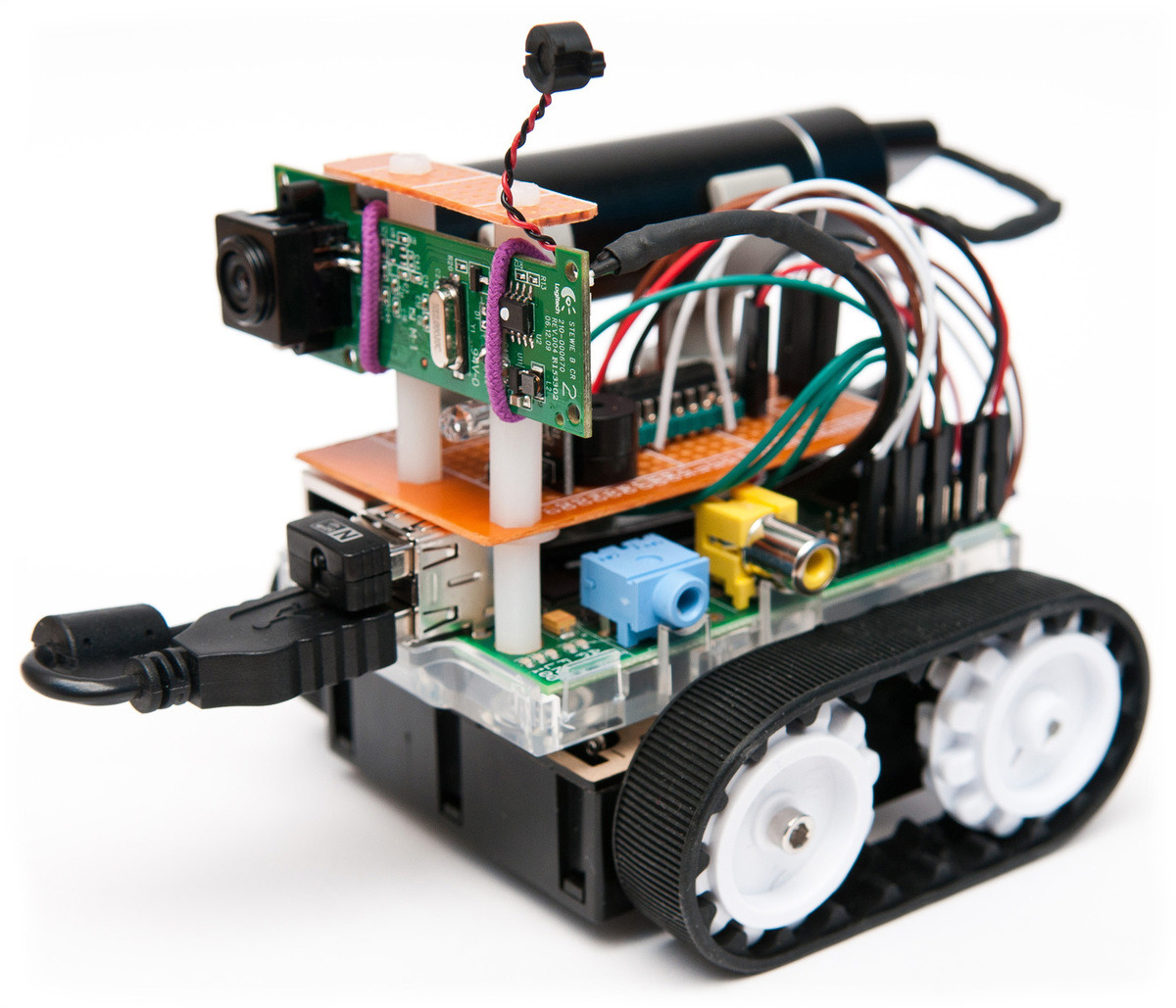 |
Frédéric Jelmoni built a neat robot with a Raspberry Pi and a Zumo Chassis Kit. The Raspberry Zumo robot can be controlled over WiFi using telnet. The server on the Raspberry Pi is written in Python and uses the RPIO library to send signals to an SN754410 motor driver that drives the two 100:1 Micro Metal Gearmotors HP in the Zumo chassis. The server also controls an RGB LED and a buzzer. A stripped-down Logitech webcam attached to the front of the robot provides video that is streamed over the web using mjpg-streamer.
For more details, see the Raspberry Zumo page, which is written in French. Also, see our post from last October about a similar robot, the Pibot-B.
Related products



Ping-pong ball collecting robot makes appearance at RubyConf
We saw this robotic ping-pong ball collector by Will Jessop on the Raspberry Pi blog a few days ago. The robot uses the Pololu 30T Track Set, a Raspberry Pi, and a lot of custom electrical and 3d-printed mechanical parts.
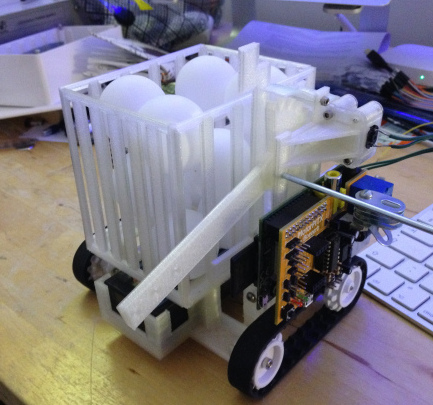 |
Apparently, Will plans to put his robot into service at the office of his employer, 37signals. This is exciting for us at Pololu because 37signals is the originator and a major sponsor of the Ruby on Rails web framework, on which our website is built. And although we did not attend this year’s RubyConf, we are proud that some of our parts, as shown in the video above, made an appearance.
You can find detailed build information in Will’s ping-pong robot blog posts.
Related products

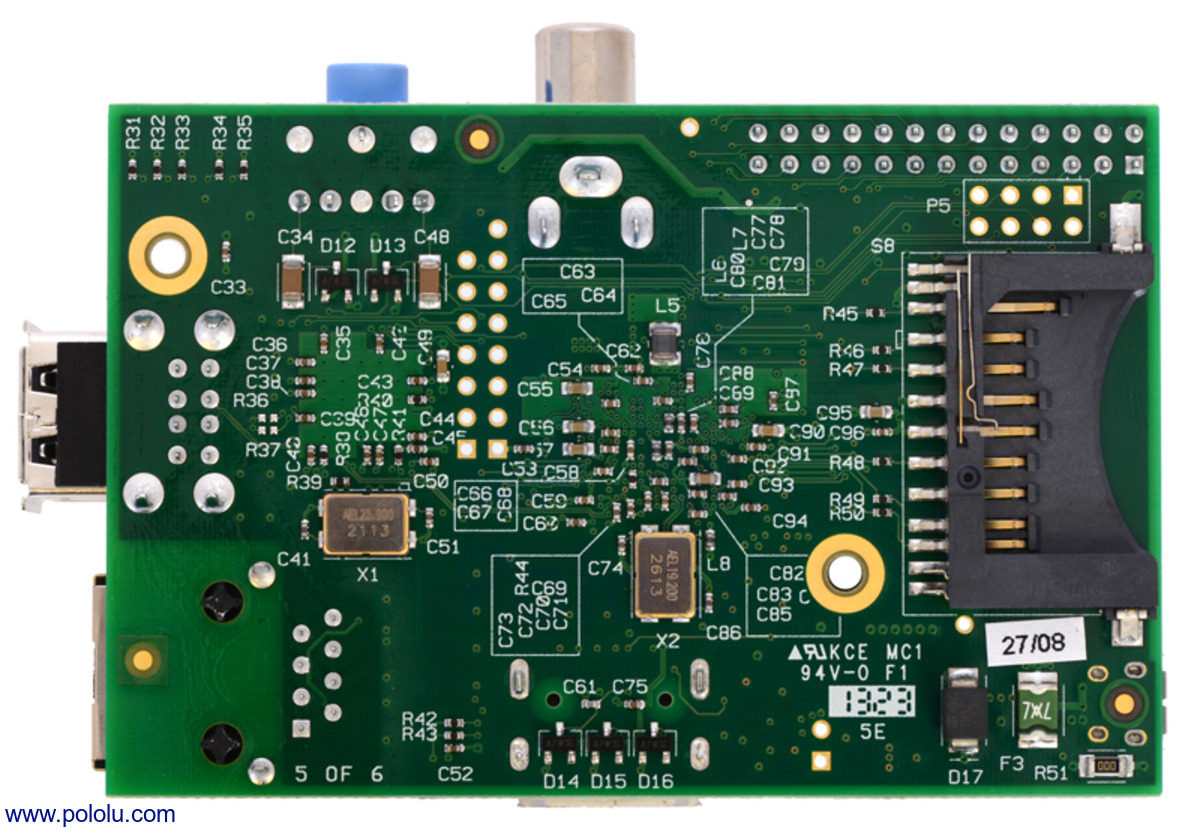
New product: Raspberry Pi
 |
We are now carrying the Raspberry Pi Model B, Revision 2.0!
In case you haven’t heard of the Raspberry Pi, it is a popular credit card-sized computer that can run Linux. It was designed by the Raspberry Pi Foundation in order to provide an affordable platform for experimentation and education in computer programming. The Raspberry Pi can be used for many of the things that a normal desktop PC does, including word-processing, spreadsheets, high-definition video, games, and programming. With its 0.1″-spaced GPIO header and small size, the Raspberry Pi also works as a programmable controller in a wide variety of robotics and electronics applications. We have seen a lot of our customers do neat things with the Raspberry Pi, and we have featured several of those projects on this blog.
Related past posts featuring the Raspberry Pi:
 |
- Digital Capabilities: a digital garden
- Controlling a Maestro in C using a Raspberry Pi
- Dagu Rover 5 controlled by a Raspberry Pi
- PiBBOT
- Raspberry Pi Telepresence Rover
- Raspberry Pi-based State Poster Project
- Raspberry Pi – Real Time Control via Android HTML5
- Pi-Trak
- Using a Maestro to control a quadcopter
- PiBot-B: mobile robot with a Raspberry Pi
- Wireless Servo Widget
For more information on the Raspberry Pi, see the product page.
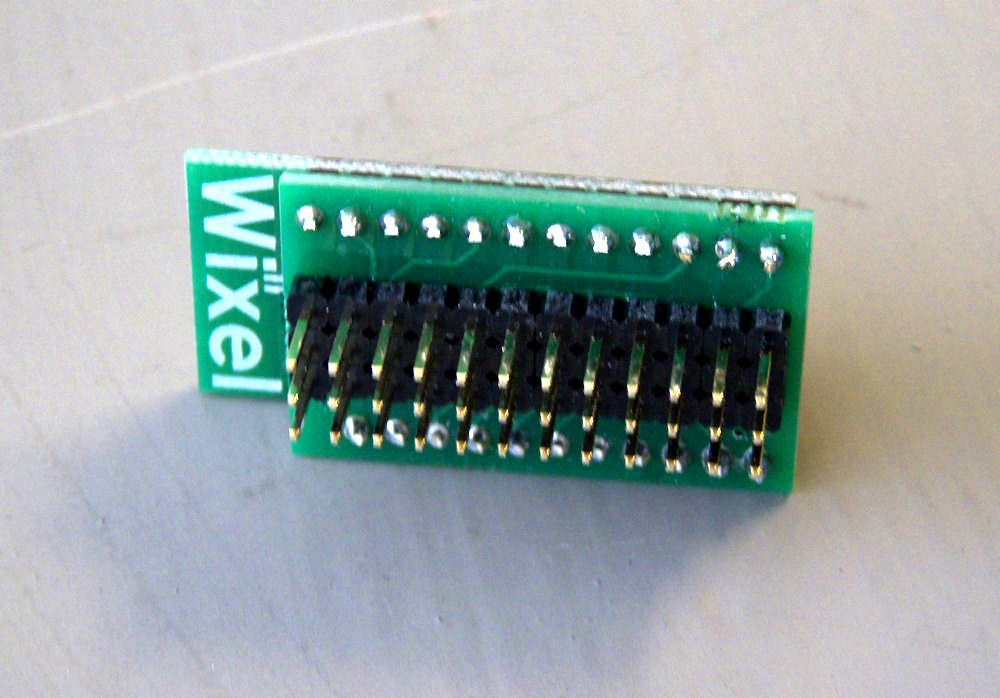
Wireless Servo Widget
 |
Pololu forum user Martan recently released a project called Wireless Servo Widget. The project website says:
Wireless Servo Widgets allow you to control up to 64 slaves, with each slave controlling up to six R/C type servos. In addition, each slave can return 3 analog input values to your Raspberry Pi. Slaves have a range of about 50 feet from the master. Use them for home automation, robotics, model train controls, or whatever you want!
The Wireless Servo Widget is based on our Wixel Programmable USB Wireless Module. Martan wrote apps for the Wixel that use the packet addressing feature of the CC2511F32 chip to implement a round-robin protocol. He also made a Slave Widget Breakout Board which makes it easy to plug servos into the slave Wixels. All of this and more can be found on the Wireless Servo Widget website.
 |
Related products

PiBot-B: mobile robot with a Raspberry Pi
 |
Thomas Schoch, of Essen, Germany, built a neat robot with a Raspberry Pi and a Zumo Chassis Kit. The PiBot-B is controlled by a custom iPhone app that communicates over WiFi to the Raspberry Pi, which is running lighttpd and PHP. A Python program uses the WiringPi library to send signals to an L293D motor driver that drives the two 100:1 Micro Metal Gearmotors in the Zumo chassis. The iPhone app displays video from the attached Logitech C300 webcam, and the robot has an integrated 8×8 LED matrix from Adafruit that indicates its state. In the future, Thomas plans to add sensors for obstacle detection and make the robot autonomous. We were impressed by several things:
- PiBot-B is very tidy, thanks in part to the USB cables that were shortened and modified using liquid rubber.
- The Raspberry Pi has only one PWM output so Thomas used two OR gates to select whether the left motor, right motor, or both motors receive the PWM signal.
- The write-up has some great photos and informative diagrams.
The PiBot-B page is written in German, but it has a link at the top to translate it into English using Google Translate.
Using a Maestro to control a quadcopter
 |
Jacques Bitoniau built a custom control system for his quadcopter that replaces a conventional RC transmitter/receiver and features the ability to switch between two different operators for training purposes. In his system, the operator moves a joystick and a WiFi-equipped PC sends commands to a Raspberry Pi, which communicates with one of our Maestros to produce signals for a flight controller.
Jacques also wrote a C++ library for Windows, Linux, and Mac to control the Maestro using its serial interface. (You can now find this as a Recommended Link on our Maestro product pages.)
You can read more about Jacques’s control system in his forum post.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7351


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2023 Pololu Corporation










