Pololu Blog »
Pololu Blog (Page 84)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
How an idea becomes a product
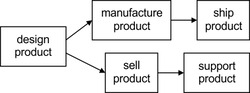
The Wixel Shield for Arduino that we released today represents a personal milestone because of what I did not do on it: the shield is the first electronic product made by Pololu that I did not design. That’s not to say I did not have some input on it or that other engineers here did not have substantial contributions to other products, but the Wixel Shield is a first because the basic product concept, the circuit design, and physical implementation (i.e. the PCB layout) were all done by someone else. We also just finished a big facility expansion that was taking up a lot of my attention this year, so I have some more time now to think about our design process and what it takes to go from a new idea to a finished product. Continued…
Rotating monitor for arcade cabinet
 |
This rotating monitor for an arcade cabinet uses a Simple Motor Controller, a gearmotor with encoders and a Pololu wheel to control the rotation.
DIY telescope remote project
 |
Scopefocus is a well-documented project for building a telescope remote based on the Micro Maestro 6-Channel USB servo controller.
Featured link: http://www.scopefocus.info/
Related products

Instructable: Introducing the Wixel USB Wireless Module
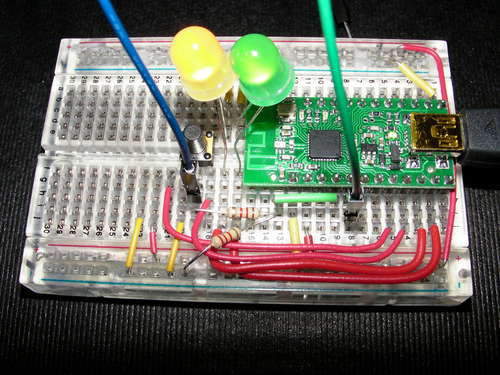 |
This Instructable by customer Michael Oz introduces the reader to the Wixel through a series of basic projects.
Related products

RC servo speed control
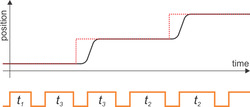
It is often desirable to control the speed and acceleration of hobby RC servos. Understanding your options can be confusing since there are various speeds involved, many similar terms are used, and the terms are not used consistently by different companies or end users. You might also have an idea of what you want your servo to do without knowing what to call it or how to describe it or how to implement it. To get a good understanding of what is going on, it is helpful to picture the position of your servo in relation to the commands you are sending it. A simple first attempt might look like this: Continued…
Advanced hobby servo control using only a timer and interrupts
In this last article about generating pulses for hobby servo control, I will present what I think is the best solution to controlling many servos or controlling some servos while still leaving enough processing time to do other tasks. It’s not that easy to make this approach work well, so my recommendation in most cases is just to get one of our servo controllers, which use this technique. Continued…
Learning PID values using simulated annealing
This is a video of a robot based on the Pololu 5" robot chassis that automatically improves its PID constants over time.
Featured link: http://www.youtube.com/watch?v=TdquX0lPlYY
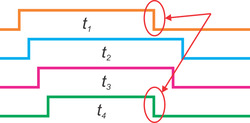
Advanced hobby servo control pulse generation using hardware PWM
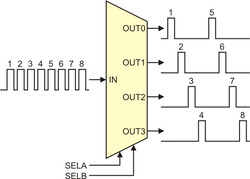
So far, I have discussed a very simple circuit and a very simple microcontroller approach to generate the control pulses needed to control hobby servos. For some applications, those methods are sufficient, but we often want either to control many servos or to do something in addition to controlling servos, and that is when the limitations of the simple approaches and the demands of the servo interface become more apparent. In this post, I will move on to some more sophisticated techniques to generate servo control pulses. Continued…
Motion simulator chairs
Jrk 12v12s are used as part of two-degree-of-freedom motion-simulator chairs (sim chairs) in this project posted to the XSimulator forums. Here is a video of some initial testing using the Jrk Configuration Utilty:
For more details see the forum post.
Related products

Homemade Segway-like personal transport
Our High-Power Motor Drivers are used to drive the motors in this homemade Segway-like personal transport by Hans Michael Steiner.
Related products



Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2023 Pololu Corporation










